
- 寬輸入電壓范圍,最高48Vdc
- 輸出電流高達25A
- 恒流輸出電壓高達40V
- 效率高達97%
- 低電流紋波
- 觸發頻率高達3kHz
- 模擬調制高達30kHz
- 過流保護
- 反向電流保護
- 撬棒電路保護
- 外部連鎖功能
- CAN接口
- 集成散熱片
- 緊湊尺寸70mm×56mm×34mm





該驅動器需要使用直流電源,該電源的輸出特性必須覆蓋驅動板的輸出功率和激光二極管的電壓。其中電源的輸出電壓必須高出激光二極管壓降的15%,我們建議使用低電壓電源(例如12VDC)來為壓降是2÷10V的低功率激光二極管供電。
HPLD-1000 PCB上配置了散熱片,便于熱管理。該驅動器會產生高達42W的功率損耗,因此驅動器的散熱片必須安裝在導熱表面上,以確保正常運行并防止過熱關斷。如果傳導冷卻不足,可以通過增加風扇來改善冷卻效果。
我們提供自己的PC端軟件來控制驅動器。
驅動板有三種工作模式,既可以獨立為單個激光器提供驅動供電,也可以用于外部控制激光器的供電系統中。
|
序號 |
模式 |
說明 |
|
1 |
連續 |
驅動板由PC端軟件控制,恒定電流值由控制軟件設置。 “ON/OFF”按鈕通過軟件設置來啟動/停止驅動器,允許在10ms內調節電流的上升和下降,確保能安全的打開/關閉激光器。詳細信息見圖1。 |
|
2 |
觸發 |
電流值由PC端軟件設置。外部觸發通過50μs的上升/下降時間啟動和停止驅動板。外部觸發的頻率可以從單脈沖到3 kHz。該模式的特點是各脈沖之間的偏置電流為40mA。驅動板的觸發到電流脈沖延遲的詳細信息見圖2。 |
|
3 |
模擬 |
電流通過外部模擬(例如正弦)信號進行調制。電流波形可以全幅復制外部的正弦信號,頻率最高可達10 kHz,對于10 kHz到30 kHz頻率的電流其調制幅度會減小至30%。外部模擬不建議使用上升/下降時間小于10μ s的信號,另外電流幅度設置的精度不超過20%。驅動板使用電流感應監視器來讀取激光電流的實際幅度、頻率和波形,其中驅動器的打開/關閉由PC端軟件控制。 |
對于模式2和模式3而言,尤其需要注意要的是將驅動器和激光二極管之間的連線長度盡可能縮短,確保不要超過200mm.
|
參數 |
最小值 |
典型值 |
最大值 |
單位 |
|
輸入 |
||||
|
電壓 |
12 |
- |
48 |
Vdc |
|
電流 |
- |
- |
22 |
A |
|
輸出 |
||||
|
功率 |
- |
- |
1000 |
mA |
|
恒流輸出電壓1) |
2 |
- |
40 |
V |
|
電流范圍 |
0.0 |
- |
25.0 |
A |
|
電流紋波幅度 |
- |
40 |
60 |
mA |
|
電流紋波頻率 |
- |
425 |
- |
kHz |
|
電流設置精度 |
- |
- |
1.5 |
% |
|
過電流值2) |
5 |
26 |
30 |
A |
|
軟件啟動上升時間3) |
- |
- |
11 |
ms |
|
軟件啟動下降時間3) |
- |
- |
16 |
ms |
|
上升/下降時間4) |
- |
50 |
70 |
μs |
|
電流設定監控 |
- |
50 |
- |
mV/A |
|
調制 |
||||
|
觸發輸入電壓 |
3.3 |
- |
5 |
V |
|
觸發輸入阻抗 |
- |
500 |
- |
? |
|
觸發脈沖頻率 |
- |
- |
3 |
kHz |
|
觸發脈沖寬度 |
150 |
- |
- |
μs |
|
觸發電流延時 |
- |
- |
20 |
μs |
|
模擬輸入電壓 |
0 |
- |
10 |
V |
|
模擬輸入阻抗 |
- |
4 |
- |
k? |
|
電流設定值 |
- |
2.5 |
- |
A/V |
|
模擬輸入頻率5) |
- |
- |
30 |
kHz |
|
功耗 |
||||
|
效率6) |
- |
- |
97 |
% |
|
最大功耗 |
- |
- |
42 |
W |
|
溫度 |
||||
|
工作溫度 |
+10 |
- |
+40 |
℃ |
|
存儲純度 |
-20 |
- |
+70 |
℃ |
|
濕度,不結露 |
- |
- |
95 |
% |
|
連接 |
||||
|
功率 |
2-pin接線端子(393900102 Molex) |
|||
|
CAN接口 |
8-pin帶狀線纜連接器(7-188275-8泰科電子) |
|||
|
連鎖 |
||||
|
觸發 |
||||
|
調制 |
||||
|
電流監控 |
SMA (5-1814832-2 Molex) |
|||
|
尺寸 |
||||
|
尺寸 |
70×56×34 mm |
|||
|
重量 |
≤200 g |
|||
1)輸出電壓不能大于0.85*Vin.
2)默認值為26A.可以編程設置為5 A到30A.
過流會導致驅動器立即停止并且帶有撬棍保護。
3)對于模式1.
4)對于模式2, 3.取決于驅動器到激光器的線纜長度。
5)詳見圖5.
6)取決于輸入電壓、輸出電壓、輸出電流。詳見圖6.
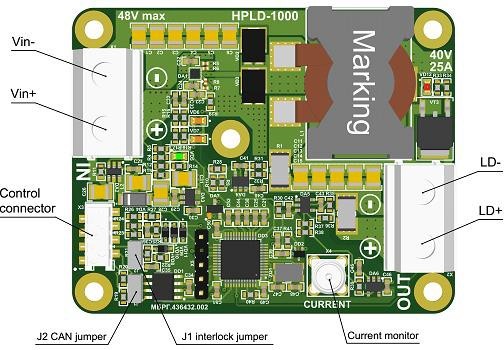
引腳功能
|
引腳 |
描述 |
||
|
Vin+ |
連接電源的正極和負極。請注意極性。 使用規格為AWG#13或2.5mm2的線纜,長度不超過1米。 |
||
|
Vin- |
|||
|
LD+ |
連接到激光二極管的正極和負極,請注意極性。使用規格為 AWG#13或者2.5mm2的線纜。模式1的線纜長度不超過2米,模式2和模式3的線纜長度不超過200mm。 |
||
|
LD- |
|||
|
控制接口 |
1 |
CANH |
連接到CAN接口,注意極性。 使用板上的跳線J1將一個驅動連接到CAN設備上。 如果連接了多個驅動到CAN設備,請刪除除了最后一個驅動以外的所有板上的跳線J1。 |
|
2 |
CANL |
||
|
3 |
Interlock+ |
連接到外部連鎖電路。 開:鎖定,低電平:可操作。 通過1 k?的電阻將內部電壓提升到3.3V。使用集電極開路或干接點。注意極性。 使用板上的跳線J2來模擬連鎖功能。刪除板上的跳線J2以啟用連鎖功能。 |
|
|
4 |
Interlock- |
||
|
5 |
Trigger+ |
連接到用于模式2、3的外部脈沖信號發生器。注意極性。 |
|
|
6 |
Trigger- |
||
|
7 |
Modulation+ |
連接到用于模式3的外部模擬電壓或外部正弦信號發生器。注意極性。 |
|
|
8 |
Modulation- |
||
|
電流監控 |
連接到50Ω的示波器輸入中以進行電流監測,50mV對應1A。使用SMA連接器。 |
||
典型性能特性
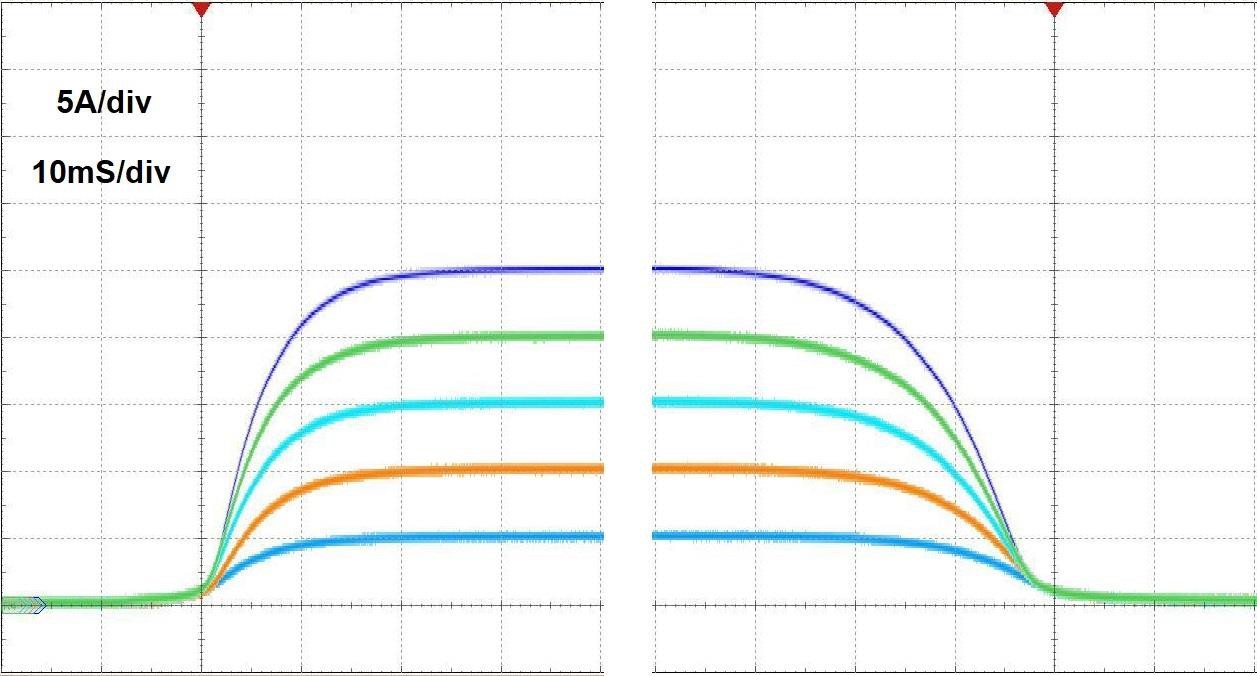
圖1.模式1:典型的電流上升/下降時間
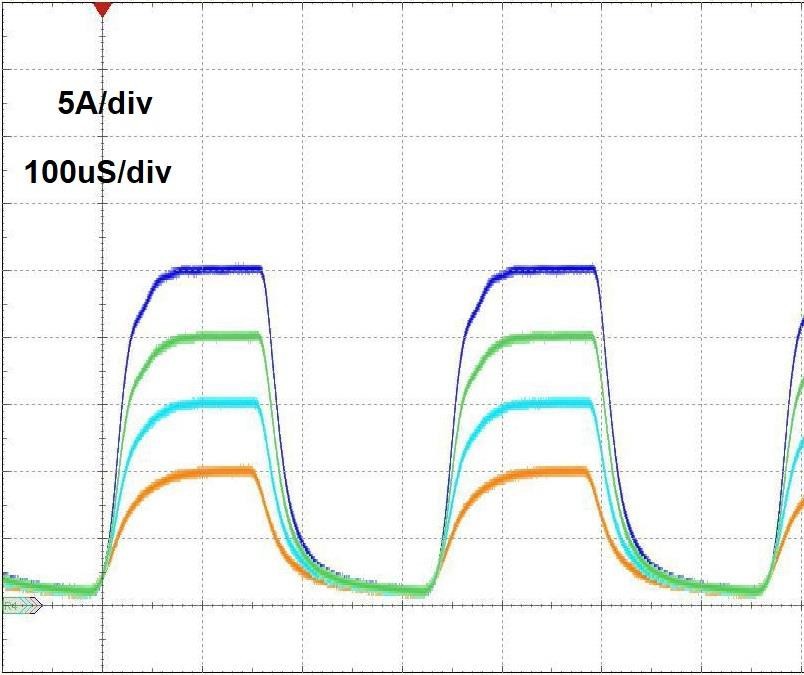
圖2.模式2:由F = 3kHz, Tp = 150μs觸發,典型的前向電流脈沖
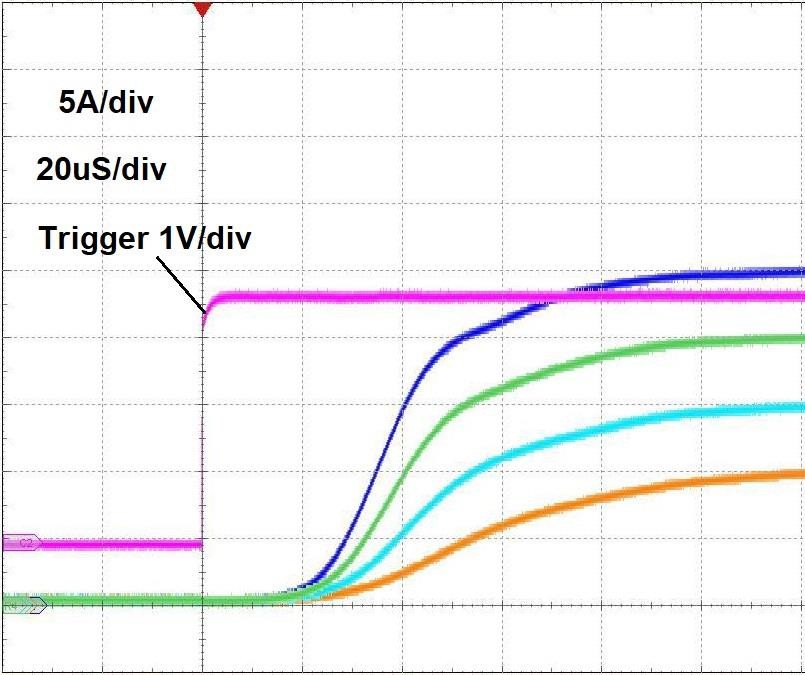
圖3.模式2:典型的觸發到電流延時

圖4.模式3:10kHZ正弦模擬調制下典型電流值
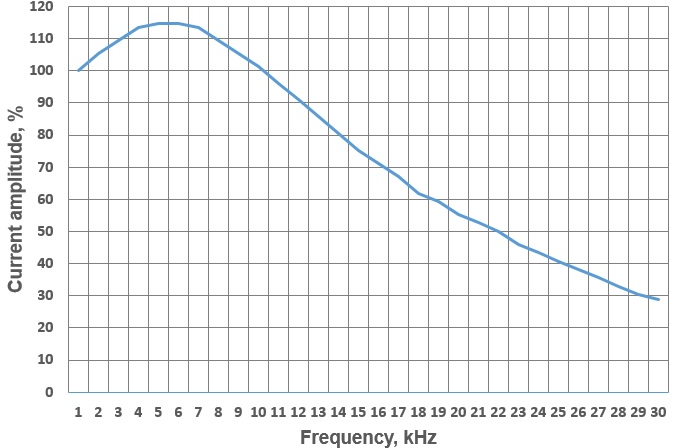
圖5.模式3:電流振幅vs頻率
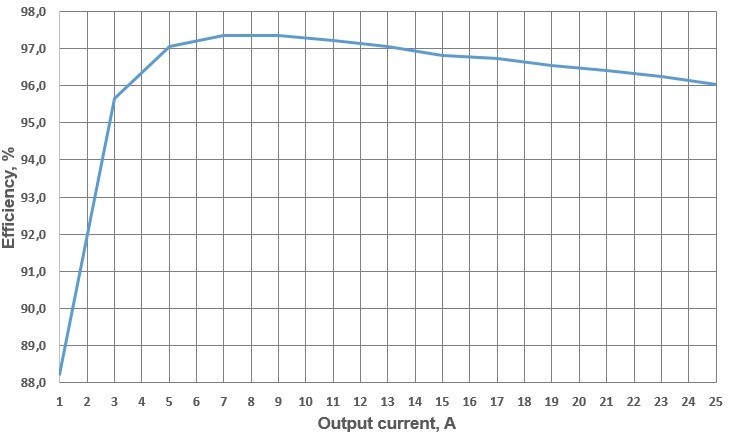
圖6.效率vs在Vin=48V, Vout=30V下的輸出電流
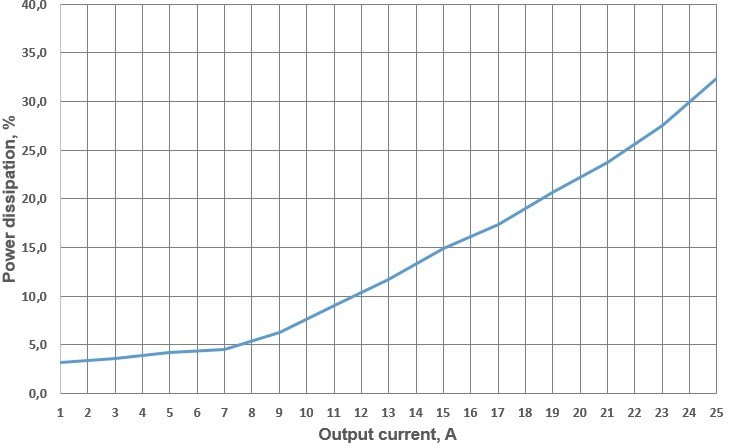
圖7.功耗vs在Vin=48V, Vout=30V下的輸出電流



